SVM
Margin
This idea of SVM is to separate data as best as possible using a margin.
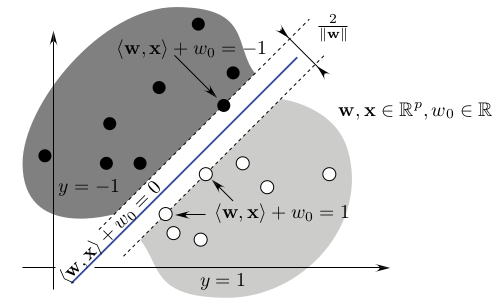
Three planes:
- $H_1: \omega^Tx+b=1$
- $H: \omega^Tx+b=0$
- $H_{-1}: \omega^Tx+b=-1$
Computing $H_1 - H_{-1}$ we get:
$(x_1-x_{-1})\omega^T=2$
=> $||x_1-x_{-1}||=\frac{2}{||\omega||}$
The SVM problem starts with a margin maximization. We want to maximize the distance between $x_1$ and $x_{-1}$ and it is equivalent to minimizing $||\omega ||$. Thus the optimization problem is written as such:
$min_{\omega,b}~\frac{1}{2}\|\omega\|^2$
$s.t.~y_i(\omega^Tx_i+b) \geq 1$ $i=1,...,n$
Primal formulation
The above problem reflects the case when all data are perfectly separable, this is not true in practice. We thus add an error term $\xi_i$ for each observation. This leads to the primal formulation of the problem:
$min_{\omega,b, \xi}~\frac{1}{2}\|\omega\|^2+C\Sigma_{i=1}^{n}\xi_i$
$s.t.~y_i(\omega^Tx_i+b) \geq 1 - \xi_i$ $i=1,...,n$
$\xi_i \geq 0$ $i=1,...,n$
Note: the problem can be rewritten with the hinge loss function
$y_i(\omega^Tx_i+b) \geq 1 - \xi_i => \xi_i \geq 1 - y_i(\omega^Tx_i+b)$
$~~~~~~~~~~~~~~~~~~~~~~~~~~~~ => \xi_i \geq 1 - y_i(\omega^Tx_i+b) \geq 0$ since $\xi_i \geq 0$
$~~~~~~~~~~~~~~~~~~~~~~~~~~~~ => \xi_i = max(0, 1 - y_i(\omega^Tx_i+b))$
$~~~~~~~~~~~~~~~~~~~~~~~~~~~~ => \xi_i = (0, 1 - y_i(\omega^Tx_i+b))_+$
$=> \xi_i = hinge(f(x))$ where $hinge$ is the Hinge loss function
$hinge(f(x)) = (1 - yf(x))_+$
Lagrange
We can write this problem using Lagrange formulation, that is, integrating the constraints into the main formula:
$\mathcal{L}(\omega,b,\xi, \alpha, \mu) = \frac{1}{2}\omega^T\omega+C\Sigma \xi_i + \Sigma \alpha_i (1-\xi_i - y_i(\omega^Tx_i+b)) - \Sigma \mu_i \xi_i$
$\alpha_i, \mu_i \geq 0$
First order conditions:
$\frac{\partial\mathcal{L}}{\partial\omega} = 0 => \omega - \Sigma \alpha_i y_i x_i = 0 => \omega = \Sigma \alpha_i y_i x_i$
$\frac{\partial\mathcal{L}}{\partial b} = 0 => -\Sigma \alpha_i y_i = 0$
$\frac{\partial\mathcal{L}}{\partial \xi_i} = 0 => C - \alpha_i - \mu_i = 0 => \alpha_i = C - \mu_i$
Since $\alpha_i, \mu_i \geq 0$ we have $C \geq \alpha_i \geq 0$
Dual formulation
We can rewrite the problem using the first order conditions above:
$\mathcal{L}(\omega,b,\xi, \alpha, \mu) = \frac{1}{2}(\Sigma \alpha_i y_i x_i)^T(\Sigma \alpha_i y_i x_i)+C\Sigma \xi_i + \Sigma \alpha_i - \Sigma \alpha_i \xi_i - \Sigma \alpha_i y_i (\Sigma \alpha_i y_i x_i)^T x_i - \Sigma \alpha_i y_i b - \Sigma \mu_i \xi_i$
$~~~~~~~~~~~~~~~~~~ = -\frac{1}{2}(\Sigma \alpha_i y_i x_i)^T(\Sigma \alpha_i y_i x_i) + \Sigma(C - \alpha_i - \mu_i)\xi_i + \Sigma \alpha_i - \Sigma \alpha_i y_i b$
$~~~~~~~~~~~~~~~~~~ = -\frac{1}{2}\Sigma_{i,j} \alpha_i \alpha_j y_i y_j x_i^T x_j + \Sigma \alpha_i$
The problem is convex with lineary inequality constraints, we can apply the saddle point theorem.
Note: a point is saddle if it’s a maximum w.r.t. one axis and a minimium w.r.t. another axis
The saddle theorem allows us to solve the problem $min_\omega max_\alpha$ as $max_\alpha min_\omega$
This leads to the problem in its dual formulation:
$max_\alpha~~-\frac{1}{2}\Sigma_{i,j} \alpha_i \alpha_j y_i y_j x_i^T x_j + \Sigma \alpha_i$
$s.t.~~0 \leq \alpha_i \leq C~~i=1,...,n$
Using the above expression of $\omega$ (optimal condition), the classification function is:
$f(x)=sign(\Sigma \alpha_i y_i x_i^T x + b)$
Kernel
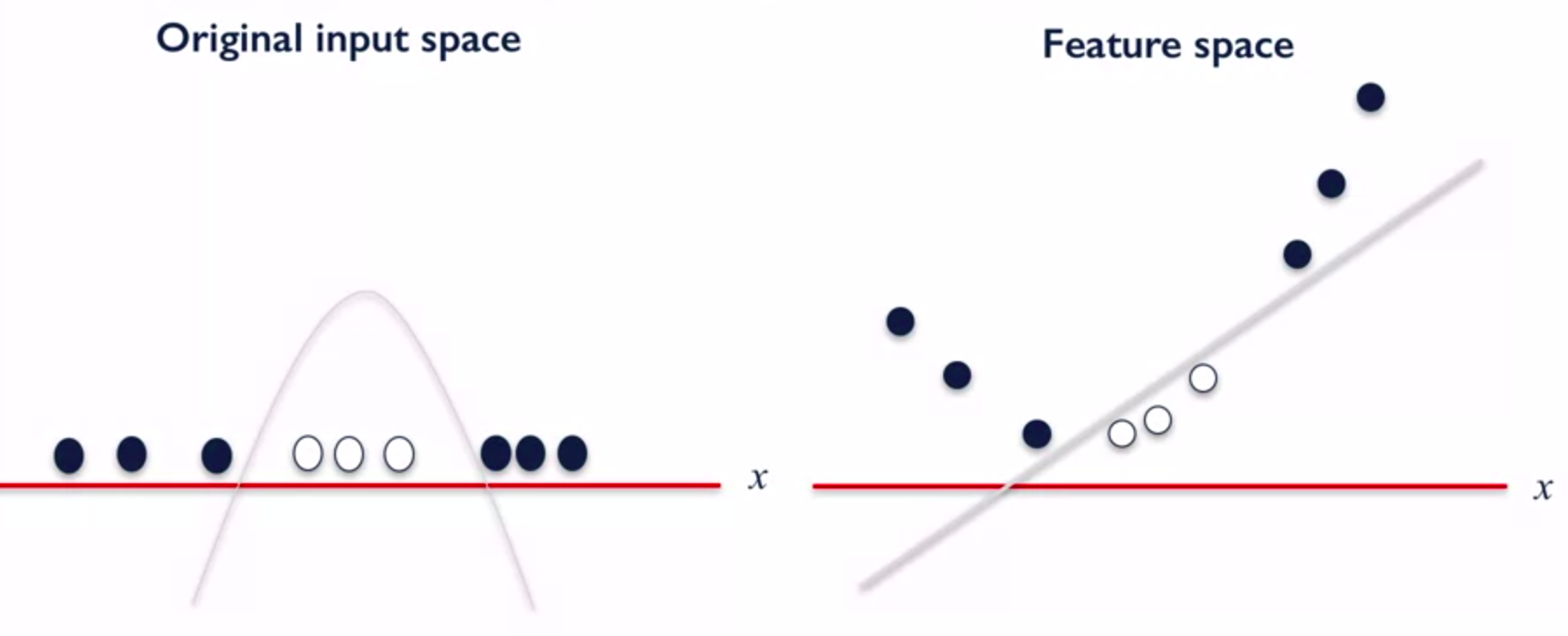
Kernels are used when separation is non linear.
Recall the primal formulation:
When separation is non linear, we set $\phi$ as a non linear transformation. The constraint becomes:
$y_i(\omega^T\phi(x_i)+b) \geq 1 - \xi_i~~i=1,…,n$
Dual formulation is now:
\[max_\alpha~~-\frac{1}{2}\Sigma_{i,j} \alpha_i \alpha_j y_i y_j \phi(x_i)^T \phi(x_j) + \Sigma \alpha_i\] \[s.t.~0 \leq \alpha_i \leq C~~i=1,...,n\] \[\Sigma \alpha_i y_i = 0~~i=1,...,n\]The classification becomes:
$f(x)=sign(\Sigma \alpha_i y_i \phi(x_i)^T \phi(x) + b)$
To classify a new point, we thus need to be able to compute $\phi(x_i)^T \phi(x)$.
Kernel trick: there is no need to know an explicit expression of $\phi$ (i.e. knowing the coordinates of points in new set) since we are only looking at distances and angles, that is scalar product.
Kernel functions implement those scalar products: $K(x,x’)=\phi(x)^T \phi(x’)$ where $\phi$ is a transformation function into a Hilbertian set $\phi : \mathcal{X} \to \mathcal{F}$
Note: an Hilbertian is a set with scalar product: $\mathcal{F}=(\mathcal{H},<.,.>)$
Most used kernels:
Linear kernel: $K(x,x’) = x^Tx’$ (we often call this setup a "no-kernel SVM")
Polynomial kernel: $K(x,x’) = (x^Tx’+c)^d$
Radial Basic Function (RBF) kernel: $K(x,x’) = exp(-\gamma||x-x’||^2)$
The optimisation problem can be written with kernel:
\[max_\alpha~~-\frac{1}{2}\Sigma_{i,j} \alpha_i \alpha_j y_i y_j K(x_i,x_j) + \Sigma \alpha_i\] \[s.t.~~0 \leq \alpha_i \leq C~~i=1,...,n\] \[\Sigma \alpha_i y_i = 0~~i=1,...,n\]Summary
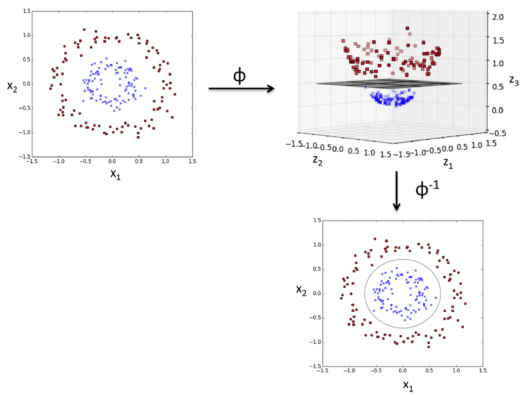
SVM allows to find complex non linear separations in transforming the problem into a higher dimension where data are linearly separable.
From 1D to 2D:
From 2D to 3D: